Detection of cooperative drones as part of „Save Aviation Tyrol“
By Yvonne Gerster
18. May 2022
Technical project report: Detection of cooperative drones as part of “Save Aviation Tyrol”
Project number: 6.604.30001 / 6.605.3001
Cooperation partners involved:
World-Direct eBusiness solutions GmbH
Twins GmbH
AIRlabs Austria GmbH


If applicable, associated research project (+ consortium):
SafeAviationTyrol (Austro Control GmbH, ÖAMTC Christophorus Flugrettungsverein, A1 Telekom Group, World Direct GmbH ,Institut für Mikroelektronik, Leopold Franzens Universität Innsbruck, Management Center Innsbruck, twins GmbH)
Save Aviation Tyrol – solutions for drone-related safety issues
Project description/methods:
The project “SafeAviationTyrol” focuses on practical and rapidly deployable solutions for drone-related safety issues. These include:
- the detection of low altitude drones and aircraft,
- the prevention of conflicts with civil aviation, and
- secure and low latency data communication links.
Project goal: a contribution to airspace security
The aim of the research project is to contribute to the safety of airspace, particularly concerning cooperative and uncooperative UAVs.
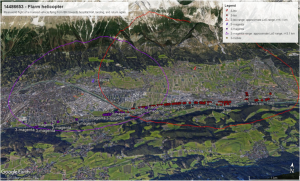
In the course of this research project, several flight operations will be conducted at different airfields. During these operations, various Detect & Avoid mechanisms will be tested (e.g., detection of ADS-B/FLARM signals as well as uncooperative drones using ground antennas). Additionally, the performance limits of individual components will be tested in different terrains and topographical variations. Lessons learned, such as antenna placement, being gathered in the course of the project.
The flight operations will proceed in three stages of complexity, each taking up two flight days. The airfields are provided by the company twins GmbH via AIRlabs.
- Test stage on a 2ha airfield with simple topography: Basic technical tests in the “open” category.
- Test stage on a 5ha airfield with difficult topography: Antenna tests and application of lessons learned, flights only in the “open” category.
- Test stage on a 5ha airfield with difficult topography: Validation of results and application of lessons learned, flights only in the “open” category.
Results/Dissemination:
It has been proven that the selected UAV architecture can be used to detect cooperative drones emitting the FLARM or ADS-B communication protocols in low-altitude aerial environments.
It was shown that with the open and modular architecture, detection of cooperative UAVs is possible, and that other protocols (e.g., OpengliderNetwork, LORA) can also be integrated.
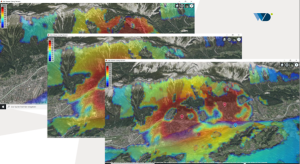
Radio range measurements were carried out under various environmental conditions and theoretical deployment models for area monitoring were developed in combination with coverage and shielding calculations.
Discussions with potential stakeholders identified application scenarios, thus defining the direction for further development/research.