

„A1 Red Cross POC“
By Yvonne Gerster
18. July 2024
Technical project report: „A1 Red Cross POC“

Summary: support emergency services in search and rescue operations
The use of UAVs can support emergency services in search and rescue operations. For example, dangers can be recognised from the air or people located in positions with poor visibility can be found. The aim of this project was to enable such missions under BVLOS (Beyond Visual Line of Sight) conditions using a 5G mobile network. To this end, tests were carried out using a 5G network from A1 as part of a Red Cross federal exercise on 27 and 28 October 2023.

Project goals and context
The overarching objectives of the project were to develop expertise in missions under BVLOS conditions that are networked using 5G/LTE and their use in search and rescue scenarios. This was to be achieved through tests that took place as part of an exercise organised by the Austrian Red Cross.
The aim of the exercise was to find two missing people from the air with the help of a camera. The camera image was to be transmitted live in HD and the drone was to fly autonomously in BVLOS mode.
Project implementation and fulfillment
The test aircraft used was developed by AIRlabs. The basis was a Skywalker Revolution, a fixed-wing UAV with good flight characteristics in slow flight. To enable communication and transmit a live image, a 5G module was developed, which is connected to a companion computer on the ground. A transmission of the camera image and telemetry data can be viewed on this computer. Since a connection to the internet was established using a 5G-capable smartphone, it was also possible to set up a live stream. The UAV was equipped with a Pixhawk Auto Pilot Flight Controller (FC), which enabled autonomous navigation via GPS points. The FC was connected to a 2.4 GHz remote control, which enabled completely manual control.
The exercise was carried out in an area of approx. 5 km2 in the Lafnitz Valley in Burgenland. The Lafnitz Valley AOI (Area of Interest) is sparsely populated, has no major differences in altitude and is characterised by fields, a pond and a river.
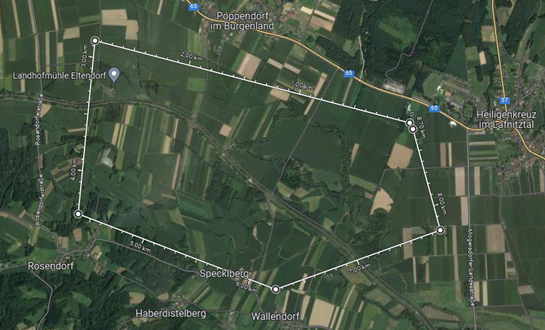
The exercise consisted of finding two missing persons with the UAV in BVLOS mode via camera live stream. The UAV was able to circle around a predetermined point independently in loiter mode while the camera was used to search for the people. The stream was also transmitted to the Red Cross command centre and the missing persons could be found.
Outlook
The knowledge gained in the areas of BLVOS operation and 5G networking of UAVs can be used in the future to make the search and recovery of people faster and easier. For future applications, it is recommended that attention be paid to better integration of the overall system (use of an integrated 5G modem instead of 5G capable smartphones) and the use of components with higher data transmission speeds in order to achieve better transmission quality with lower latency. As the UAV was only a prototype, improvements are also possible here, such as a camera stabilised by a gimbal or a longer flight time.