Latency measurement of optical UAS sensors
By airlabs
25. April 2022
Project number: 5.512.20001 (Latency measurement sensor data recording)
Involved cooperation partners:
FH Kärnten | University of Applied Sciences
Twins GmbH
AIRlabs Austria GmbH
Project description/methods:
For triggering RGB cameras, the time span of triggering and saving the image on the SD card was determined. The trigger source originates from the autopilot. The trigger is recognisable as an inclining or declining edge, better known as a PDM-signal.
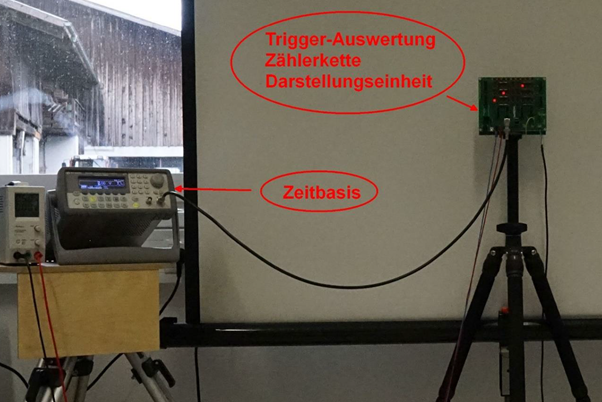
Measurement setup:
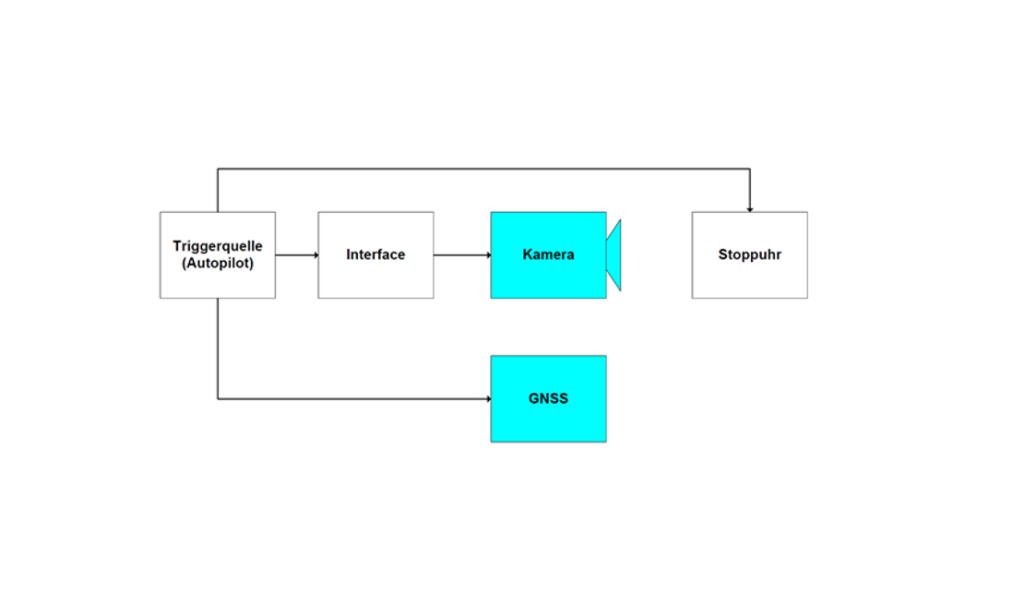
The autopilot simultaneously triggers the latency measurement station (shown as a stopwatch in the block diagram), the camera trigger and, if present, a GNSS system for the time stamp of the geodetic datum. If the trigger source is a PDM-signal, an interface is required to convert the PDM-signal into an inclining edge for the camera.
Implementation:
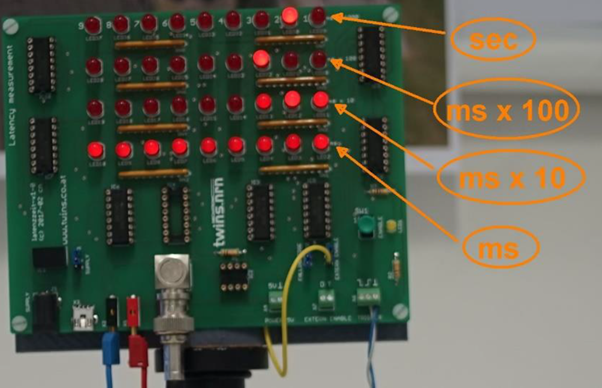
The trigger signal is tapped by the autopilot and checked with the oscilloscope. The first pulse shows a pulse width of 1ms. The camera is not triggered at this pulse width. For the second and third pulse, the pulse width is 2ms. The camera is triggered. The trigger evaluation of the latency measuring station starts the counter chain at the first occurring pulse with a duration of 2ms and the camera displays the LED-matrix as an image.
Results/Dissemination:
The general knowledge of the latency of a moving UAS sensor is of great importance for the exact determination or blurring of the position accuracy of the sensor measurement.
The arithmetic mean latency for this measurement setup is 420ms.
Associated research project (+consortium):
Internal project of SIENA research group at the FH Kärnten (Spatial Informatics for ENvironmental Applications)