Latenzzeitmessung von optischen UAS-Sensoren
By airlabs
25. April 2022
Projektnummer: 5.512.20001 (Latenzzeitmessung Sensorikdatenaufnahme)
Involvierte Kooperationspartner:
FH Kärnten gemeinnützige Gesellschaft mbH
Twins GmbH
AIRlabs Austria GmbH
Projektbeschreibung/Methoden:
Für das Triggern von RGB Kameras wurde die Zeitspanne des Auslösens bis inklusive des Abspeicherns des Bildes auf der SD-Karte bestimmt. Die Trigger-Quelle stammt vom Autopiloten. Die Trigger-Form ist eine auf- oder absteigende Flanke bzw. ein PWM-Signal.
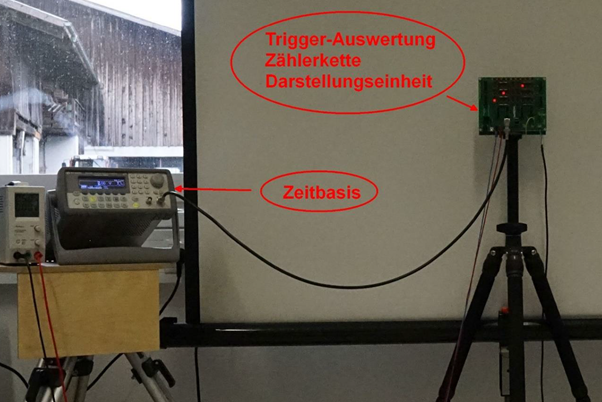
Messaufbau:
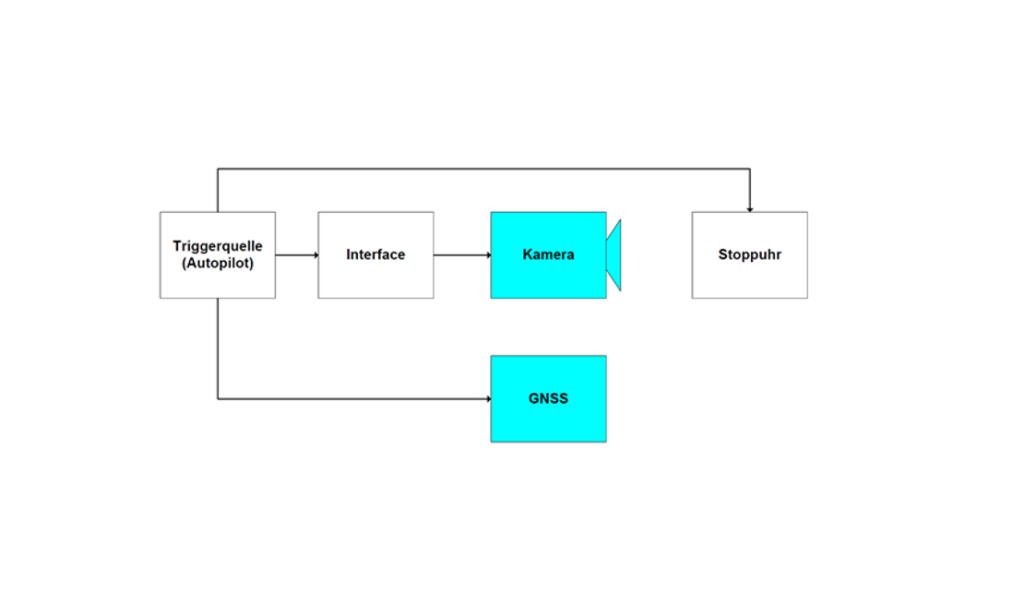
Der Autopilot triggert gleichzeitig den Latenzzeitmessplatz (im Blockdiagramm als Stoppuhr dargestellt), den Auslöser der Kamera und wenn vorhanden ein GNSS System für den Zeitstempel des Positionsdatums. Ist die Trigger-Quelle ein PWM-Signal, so benötigt es ein Interface zum Umformen des PWM Signals in eine steigende Flanke für die Kamera.
Durchführung:
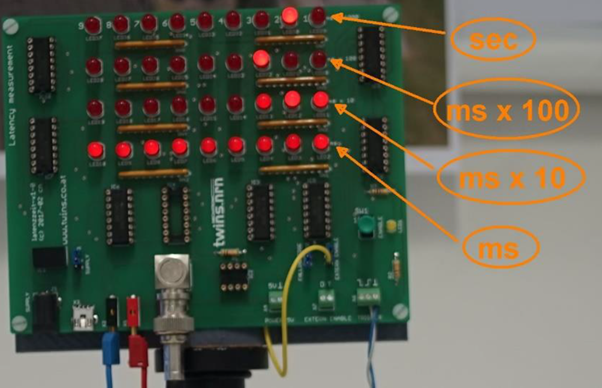
Das Trigger-Signal wird vom Autopiloten abgegriffen und mit dem Oszilloskop überprüft. Der erste Puls zeigt eine Pulsweite von 1ms. Bei dieser Pulsweite wird die Kamera nicht ausgelöst. Beim zweiten und dritten Puls beträgt die Pulsdauer 2ms. Die Kamera wird ausgelöst. Die Trigger-Auswertung des Latenzzeitmessplatzes startet beim ersten auftretenden Puls mit einer Dauer von 2ms die Zählerkette und die Kamera bildet die LED-Matrix als Bild ab.
Ergebnisse/Dissemination:
Das grundsätzliche Wissen um die Latenzzeit eines sich bewegenden UAS Sensors ist von großer Wichtigkeit für die exakte Bestimmung bzw. Unschärfe der Positionsgenauigkeit der Sensormessung..
Arithmetischer Mittelwert der Latenzzeit für diesen Messaufbau beträgt 420ms.
Verbundenes Forschungsprojekt (+Konsortium):
Interes Projekt Forschungsgruppe SIENA an der FH Kärnten (Spatial Informatics for ENvironmental Applications)