

„Swarm Init“
By Yvonne Gerster
11. Juli 2024
Technischer Projektbericht: „Swarm Init“
Projektnummer: 5.504.20001
Involvierte Kooperationspartner:
Lakeside Labs GmbH
Universität Klagenfurt
AIRlabs Austria GmbH

Zusammenfassung: LSL-Drohnenflug ohne GPS-Unterstützung
In diesem Projekt wurde eine Drohne von Lakeside Labs (LSL) in die Infrastruktur der Drohnenhalle der Universität Klagenfurt (AAU) integriert. Bisher waren mit den Drohnen von LSL nur für Flüge im Freien mit GPS-Unterstützung möglich. Durch dieses Projekt wurde es möglich, dass Drohnen von LSL auch andere Lokalisierungsarten unterstützen. Die Drohnenhalle von AAU bietet ein OptiTrack Motion Capture System, das Drohnen die Lokalisierung mittels Kameras erlaubt. Im Laufe des Projektes wurde die Drohne sowohl hardware- als auch softwareseitig adaptiert und in das OptiTrack-System integriert. Abschließende Testflüge demonstrierten die Funktionsfähigkeit des Systems.
Projektziele und Kontext
Ziel des Projektes war die Vorbereitung einer Drohne von LSL für Flüge ohne GPS-Unterstützung. Dies sollte die Grundlage für zukünftige Projekte legen, in denen sich Drohnen und Drohnenschwärme ohne GPS-Unterstützung lokalisieren müssen. Durch dieses Projekt sollten die notwendigen Erfahrungen gesammelt werden, sowie Hardware und Software vorbereitet werden, um in Zukunft schneller ein GPS-loses Drohnensystem aufsetzen zu können.
Projektdurchführung und -erreichung
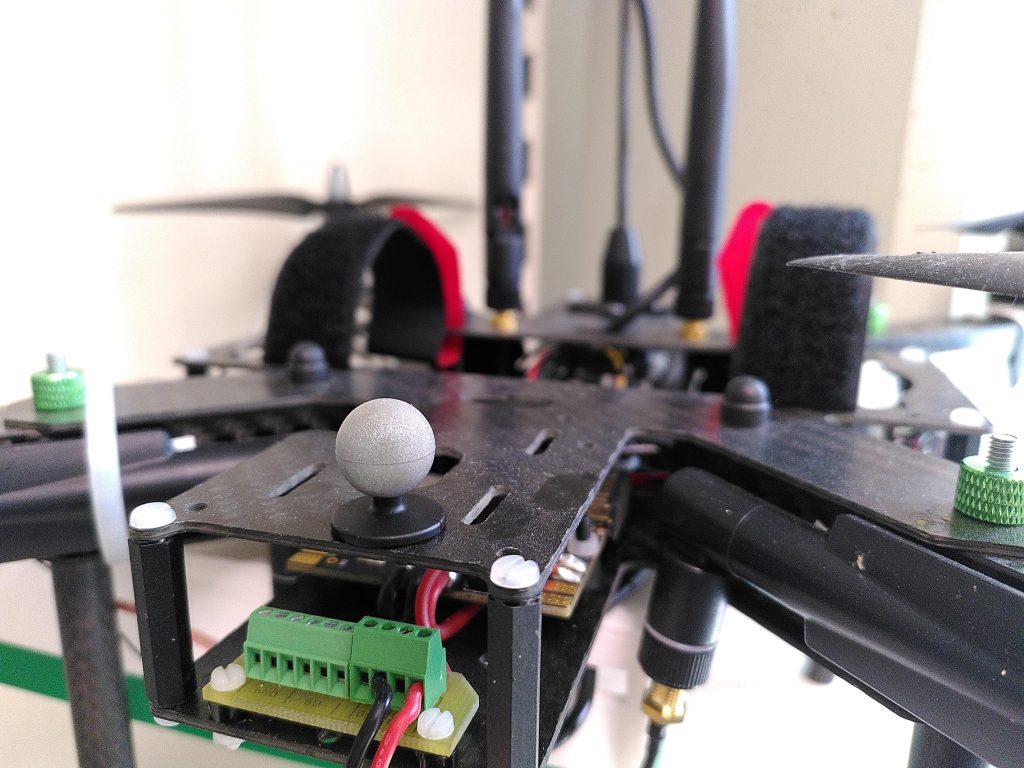
Das Projekt begann mit einem Kickoff-Meeting am 13.11.2020. Teilnehmer waren Andreas Kercek und Micha Sende von LSL sowie Stephan Weiss von AAU. Es wurden die Projektziele definiert und die technischen Herausforderungen besprochen. LSL erhielt dabei einen kurzen Überblick über die Fähigkeiten des OptiTrack Motion Capture Systems, das in der Drohnenhalle installiert ist, sowie die die notwendigen Vorbereitungen, um eine Drohne in die Infrastruktur der Drohnenhalle einzubinden. Es stellte sich heraus, dass dafür sowohl hardware- als auch softwaremäßige Anpassungen auf der Drohne notwendig sind. Die notwendigen Softwarepakete wurden dabei von AAU bereitgestellt [1]. Hardwareseitig werden reflektierende Marker für die Installation auf den Drohnen benötigt [2]. Als nächstes wurde eine twinFOLD SCIENCE Drohne aus dem Inventar der LSL in drei Schritten für die Testflüge vorbereitet. Dabei wurden als erstes die reflektierenden Markerkugeln auf der Drohne installiert (s. Abbildung 1). Wichtig ist dabei, dass zumindest drei Kugeln in linear unabhängigen Positionen angebracht werden.
Der zweite Schritt der Anpassung besteht aus einer benutzerdefinierten Firmware für die Flugsteuerung. Diese basiert auf dem PX4 Autopiloten [3] dessen Parameter angepasst wurden und das Feedback des OptiTrack Motion Capture Systems für die Lokalisierung zu verwenden.
Als drittes wurde die notwendigen Software-Pakete am Bordcomputer installiert und konfiguriert. Zentral ist dabei die Virtual Reality Peripheral Network (VRPN) Software [1]. Diese empfängt die vom OptiTrack Motion Capture System berechnete Position der Drohne über eine WLAN-Verbindung und leitet sie lokal an die Flugsteuerung weiter.
Nachdem die Vorbereitungen abgeschlossen waren, fanden am 20.11.2020 die ersten Integrationsschritte statt. Dafür wurde die vorbereitete Drohne in das OptiTrack-System eingebunden. Die Kameras erkennen die individuelle Anordnung der reflektierenden Markerkugeln. Dieser Anordnung wird dann eine spezielle Identifikation zugeordnet und erlaubt eine eindeutige Erkennung und Lokalisierung der Drohne im dreidimensionalen Raum der Drohnenhalle.
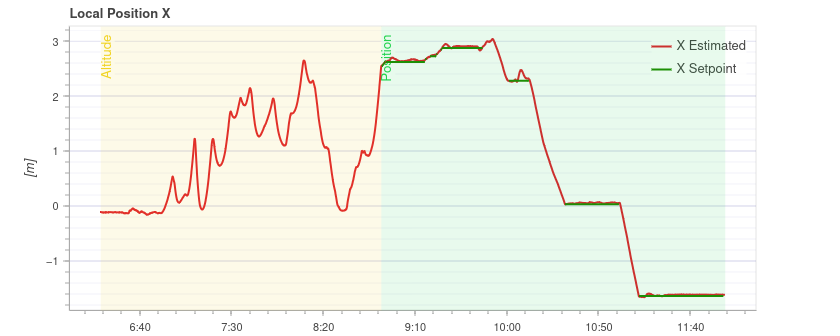
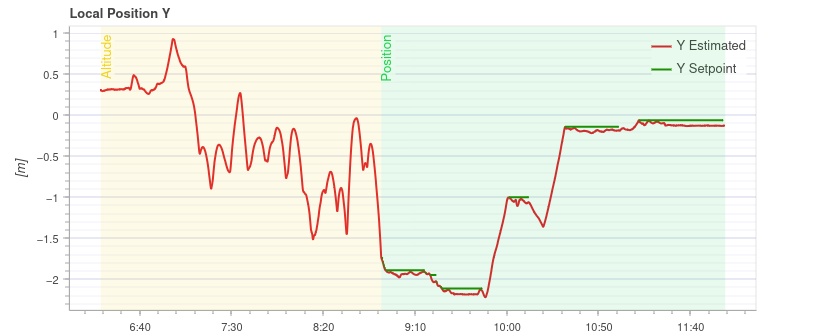
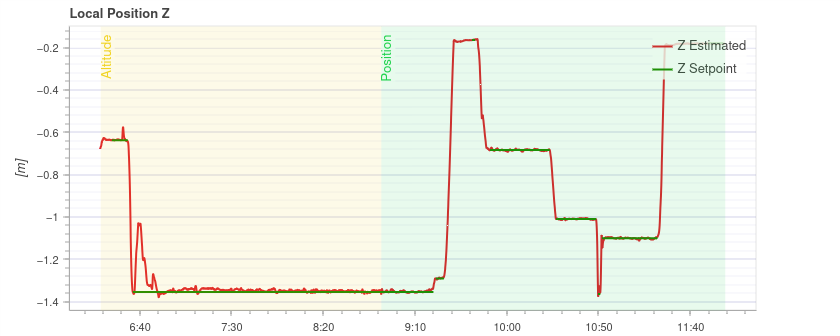
Schließlich wurden am 11.02.2021 Flugtests durchgeführt. Dabei wurde die Drohne manuell gesteuert und flog vorgegebene Wegpunkte ab. Die Logdaten eines Fluges sind in Abbildung 2 ersichtlich. An der geringen Abweichung zwischen roten und grünen Linien erkennt man deutlich, dass die Lokalisierung der Drohne gut funktionierte.
Projektressourcen
- 1,5 Tagen (inkl. Vorbereitungen)
- twinFOLD SCIENCE Drohne (von LSL bereitgestellt)
- Drohnenhalle (von AAU bereitgestellt)
- Reflektierende Markerkugeln (von LSL angeschafft)
Projektergebnisse und Schlussfolgerungen: erfolgreiche Durchführung von Flügen
In diesem Projekt wurde eine Drohne von LSL in das OptiTrack-System der AAU Drohnenhalle integriert. Es konnten erfolgreich Flüge durchgeführt werden.
Die Drohnenhalle bietet eine sichere Umgebung um einzelne Komponenten (Hardware oder Software) vor Flügen im Freien zu testen. Allerdings bietet sie nur eine begrenzte Größe, was keine komplexeren und großflächigeren Missionen erlaubt.
Ausblick und Empfehlungen
Für zukünftige Projekte bietet die Drohnenhalle eine Möglichkeit, einzelne Komponenten in einer sicheren Umgebung zu testen. Dies gilt speziell für Drohnenflüge, bei denen eine Lokalisierung ohne GPS erforderlich ist.
Publikationen/ Literatur
[1] https://github.com/aau-cns/ros_vrpn_client
[2] https://docs.optitrack.com/motive/markers
[3] https://px4.io
[4] https://github.com/aau-cns/flight_stack/wiki