
Upgrade der Flugplattform twinSCIENCEV2
By Florentina Hartbauer
8. August 2023
Projektnummer: 5.504.20002
Involvierte Kooperationspartner:
Twins GmbH
AAU Alpen-Adria-Universität
AIRlabs Austria
Einleitung
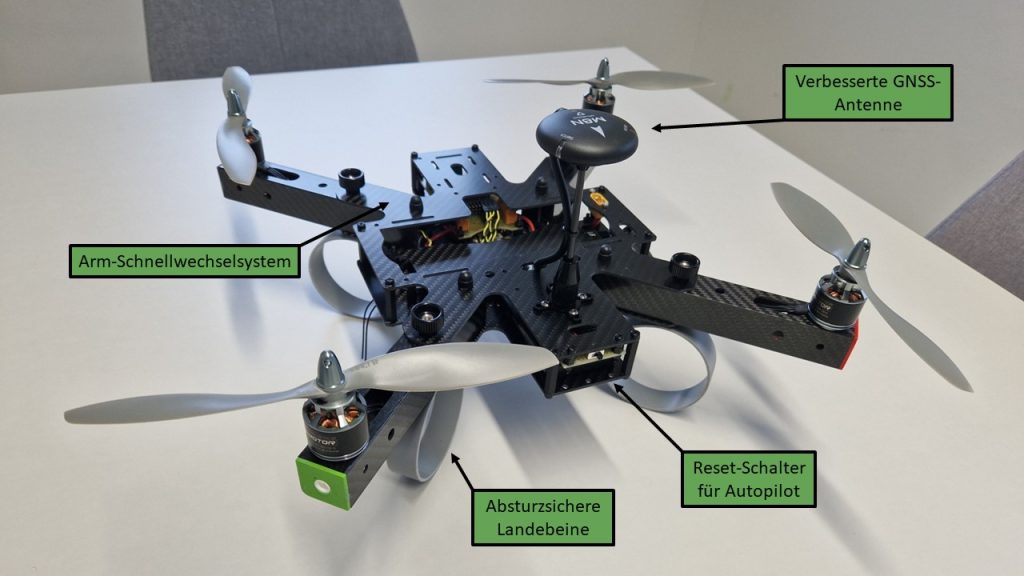
Die Testplattform twinSCIENCE (siehe Abb.1) fördert eine neuartige Zusammenarbeit in AIRlabs und ermöglicht vielfältige Entwicklungen und Erprobungen. Die Plattform erlaubt rasche Iterationen zwischen Design und Test von Methoden und Algorithmen. Die effiziente Entwicklung neuer Autonomie-, Steuerungs- und Missionselementen für Drohnen wird durch die Partnerschaft mit der Universität Klagenfurt ermöglicht.
Projektbeschreibung/Methoden
Das durchgeführte Aufbauprojekt umfasst ein Upgrade der Flugplattform twinSCIENCEV2, um längere Flugzeiten unter Maximallast zu ermöglichen. Das Projekt wurde in der zweiten Jahreshälfte 2021 durchgeführt und im Jahr 2023 abgeschlossen. Geplant waren ursprünglich mechanische, elektrotechnische und softwaretechnische Anpassungen, wobei letztere nach eingehender Prüfung aus Ressourcengründen nicht umgesetzt werden konnten.
Das implementierte Upgrade umfasst mechanische und elektrotechnische Anpassungen. Die Plattform wird als Test-Infrastruktur für AIRlabs bereitgestellt (siehe Leistungskatalog), um verschiedene Nutzeranforderungen zu erfüllen und bei unterschiedlichen Testszenarien für verschiedene Flugmanöver und Motorenkonfigurationen eingesetzt zu werden.
Mechanische Anpassungen
Im Zuge der mechanischen Anpassungen wurden folgende Verbesserungen vorgenommen:
- Optimierung des Landegestells, sodass eine erhöhte Stabilität für harte Landungen gewährleistet ist. Das Landegestell ist leicht und federnd.
- Eine EMV Optimierung lässt einen RTK sub-cm Fix in gutmütigen Umgebungen zu, auch wenn zusätzlich ein Companion-Board (z.B. Raspberry-PI oder Odroid), USB3 Kamera, und andere Sensoren im Betrieb sind.
- Eine leichtere Bauweise bringt merkliche Gewichteinsparungen (z.B. >30%). Dabei können leichte Einbußen punkto mechanischer Robustheit in Kauf genommen werden (z.B. externe Kabelführung, Sandwichstruktur anstatt Hohlraumstruktur etc.). Als Vorbild können Racecopter-Rahmen dienen.
Elektrotechnische Anpassungen
Die elektrotechnischen Anpassungen umfassen die folgenden Aspekte:
- Integration eines Reset-Schalters auf dem PX4 zur separaten Steuerung eines Reboots oder einer Stromunterbrechung.
- Eine Möglichkeit für einen einfachen Batterie-Hot-Swap wurde integriert, um einen Batteriewechsel ohne Beeinträchtigung der laufenden Software zu ermöglichen.
- Die IMU unterstützt eine hohe Auslesefrequenz (bis zu 4 kHz) für Gyro und Beschleunigung.
- Ein Telemetrie-Datenlink über X-Bee oder ähnliche LoRa-Methoden ist verfügbar, um eine hohe Reichweite und Robustheit zu gewährleisten.
- Die Stromversorgung entspricht den Anforderungen von Companion Boards (z. B. Odroid) mit einer Versorgung von ca. 8-12A ohne Spannungseinbrüche.
- Eine Reihe von GPIOs können über Companion Board und PX4 angesteuert werden, insbesondere zur hardwareseitigen Zeitsynchronisation externer Sensoren.
Weitere Anpassungen
Eine neue Power/PWM Platine wurde entwickelt, um die Arme wieder mit Steckern für Strom und PWM Signale auszustatten und so den Austausch zu erleichtern.
Weiters wurde auf 6-Zellen-Batterien umgestellt.
Test und Validierung in der Drohnenhalle
Die oben genannten Punkte wurden, soweit anwendbar, in Zusammenarbeit mit der Universität Klagenfurt in der Drohnenhalle der AAU getestet und validiert.
Für eine weitere Beschreibung der durchgeführten Anpassungen sehen Sie bitte beiliegenden technischen Abschlussbericht.